test 터널, 암거와 같은 환경에서도 최고의 스캔 결과를 얻을 수 있는 방법
핸드헬드, 차량/백팩/드론 탑재가 가능한 3차원 라이다인 Emesent Hovermap(호버맵)은 SLAM(Simultaneous Localization and Mapping) 기술을 사용하여 위치를 파악하고 정확한 포인트 클라우드를 생성합니다.
드론 자율 주행에 대한 수년간의 연구 끝에 이머센트의 SLAM 알고리즘은 지하와 같은 GPS가 작동하지 않는 도전적인 환경에서도 매우 안정적인 결과를 보여줍니다.
하지만 SLAM은 캡처된 결과가 환경의 특징을 식별하는 데 더 많이 의존한다는 점에서 일반 레이저 스캐닝과 다릅니다.
따라서 터널과 암거는 SLAM 스캐너에게 가장 도전적인 환경 중 하나입니다. 이러한 환경에서는 특징 부족으로 SLAM이 오류로 인해 일관성 없는 포인트 클라우드가 생성되어 최종 목적으로 사용하기 어려울 수 있습니다.
이러한 어려운 암거 스캔 과정과 최고의 결과를 얻을 수 있는 몇 가지 팁을 소개해드립니다.
|
한 예시로 보여드릴 암거는 길이가 130m, 너비가 3m, 높이가 3.5m로 상당히 좁습니다. 바닥, 천장, 벽이 매끄럽고 암거 양쪽 끝의 환경은 주로 나무와 개울로 구성되어 있습니다.
SLAM은 Hovermap이 어디에 있는지 파악하기 위해 주변 환경의 표면을 사용합니다.
암거의 벽, 바닥 및 천장은 Hovermap이 암거의 단면 내에서 정확한 위치를 파악하는 데 매우 유용한 특징이지만, 암거의 길이 방향으로는 호버맵 위치를 파악하기 위한 정보는 제공하지 않습니다.
환경에 다른 특징 정보가 없는 경우, SLAM은 쉽게 오류가 발생할 수 있습니다.
|
특징이 적은 환경에서 데이터를 수집하기 위한 팁 |
가장 좋은 방법은 Hovermap이 암거의 양쪽 끝을 볼 수 있게 하는 것입니다. 아래 사진과 같이 몸 옆으로 들고 있는 것이 좋습니다.
암거의 길이 방향을 따라 위치를 결정할 수 있는 특징이 없기 때문에, SLAM은 암거 양 끝의 특징을 사용하여 위치를 결정합니다. 따라서 양쪽 끝이 최대한 보이도록 하는 것이 SLAM 오류를 최소화하는 데 핵심적입니다. 또한 호버맵이 암거 중앙에 위치하도록 하고, 빠른 움직임이나 갑작스러운 움직임은 피해야 합니다.
암거의 특징이 적기 때문에 SLAM을 혼란스럽게 할 수 있는 움직이는 사람이나 차량, 물, 안개 등의 부정적인 특징들은 피해야 합니다.
안전상의 이유로 누군가와 동행해야 한다면, 호버맵의 반대편, 즉 사각지대에 있도록 하여 부정적인 특징을 만들지 않도록 해야 합니다.
만약 다른 방법이 모두 실패한다면, 환경에 나만의 특징을 직접 추가할 수도 있습니다. 예를 들어, 50m 간격으로 큰 종이 상자를 배치하여 이 상자들이 스캔 중에 움직이지 않도록 하면 됩니다.
|
Emesent는 암거의 스캔을 두 가지 방식으로 진행했습니다.
1. Hovermap을 옆으로 들고 뒤에 아무도 따라오지 않음
2. Hovermap을 백팩에 장착하고 뒤에 사람이 따라옴
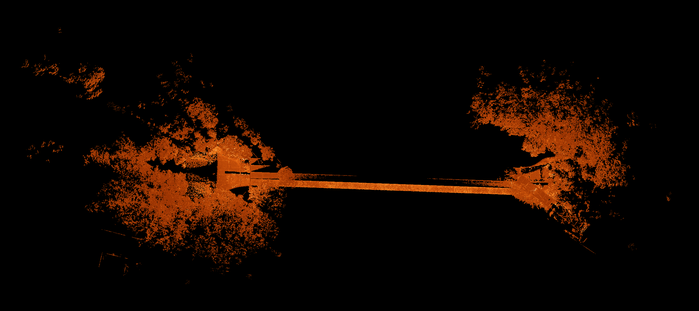
첫 번째 스캔은 Aura의 기본 설정을 사용하여 오류 없이 처리되었습니다.
터널 안의 그래피티를 사용하여 SLAM 오류가 없다는 것을 확인할 수 있습니다.
|
두 번째 스캔은 호버맵을 백팩에 장착된 상태로 진행하여 시야가 제한되었고, 뒤에 따라오는 사람으로 인해 부정적인 특징이 추가되면서 기본 설정으로는 오류를 피할 수 없었습니다.
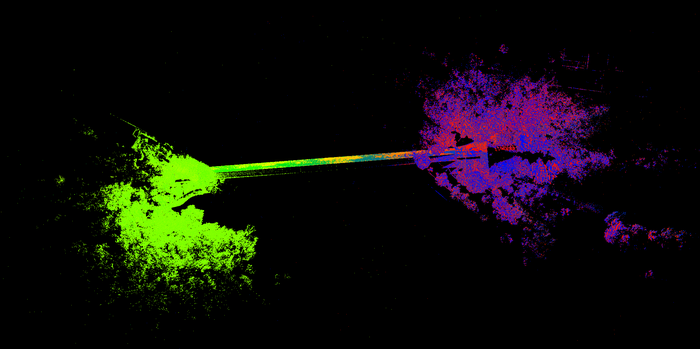
스캔을 시간별로 색상을 표시하면 SLAM 오류가 발생한 시점을 강조할 수 있습니다. 3색 이미지에서 스캔은 암거의 오른쪽 끝에서 시작하여 암거를 통과했다가 다시 돌아왔습니다. 돌아오는 도중에 SLAM은 크게 오류를 일으켰고, 그 결과 스캔의 끝이 시작 부분과 일치하지 않았습니다.
위 이미지는 시간을 기준으로 색상이 표시된 스캔 데이터입니다.(파란색->녹색->빨간색)
스캔의 파란색 부분은 시작 지점이고, 빨간색 부분은 끝 지점이며, 두 지점은 일치해야 합니다. |
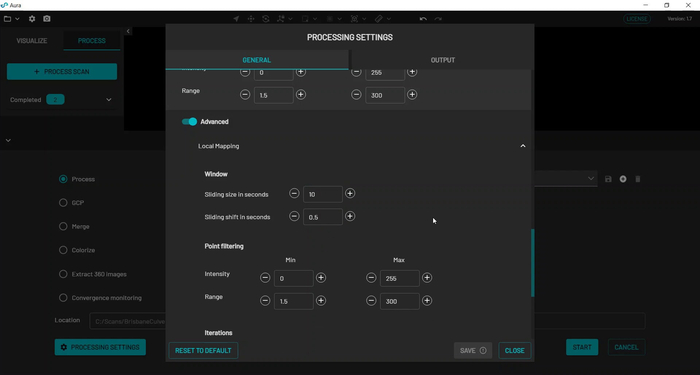
SLAM 오류를 줄이기 위해 Aura에서 변경할 수 있는 몇 가지 설정이 있습니다.
Advanced -> Local Mapping -> Window에서 기본값인 Sliding size를 5초에서 10초로, Sliding shift를 1초에서 0.5초로 변경합니다. 이러한 값들을 변경하면 SLAM 파이프라인의 일부 처리 시간이 4~5배 증가한다는 점에 유의해야 합니다. |
이렇게 수정된 Aura 설정을 통해 스캔은 이제 오류 없이 성공적으로 처리되며, 스캔의 시작과 끝이 완벽하게 일치하게 됩니다. |
(주)이즈소프트
E support@is-soft.co.kr T 031-346-5112
본사 경기도 군포시 공단로 140번길 46, 엠테크노센터 1001~1004호
자동화센터 경기도 군포시 농심로 2, 삼보스카이비즈 B204호
울산지사 울산광역시 울주군 삼남읍 울산역 2길 52, 2층
충돌인증 시험센터 경기도 화성시 마도면 화성로 785번길 117-12
|
|
|