test 역사를 데이터로 남기다, Stonex XVS가 문화유산을 기록하는 방법
라이다(Lidar) 기술은 데이터 획득의 신뢰성, 정확성 및 속도가 향상되면서 급격한 성장을 이루었습니다. 특히 휴대용 라이다 스캐너가 등장하면서 다양한 분야에서 활용되고 있습니다.
하지만 정밀도가 다소 낮아 이를 극복하기 위해 이미지 기반 센싱 기술이 발전합니다. 최근 사진 측량 및 컴퓨터 비전 기술은 수백 장의 이미지에서 동등점을 빠르게 계산하며, 높은 해상도의 텍스처와 정확한 3D 모델을 생성하는 능력을 갖추게 되었습니다.
이와 같은 기술 발전으로 [Stonex(스톤엑스) XVS] vSLAM 3D스캐너가 출시되었습니다.
|
사례 연구: 바실리카 델 트람팔 스캔 프로젝트 |
[프로젝트 개요]
Stonex(스톤엑스) XVS 스캐너의 성능을 검증하기 위해, 스페인 알쿠에스카(Alcuescar)에 위치한 산타 루시아 델 트람팔(Basílica del Trampal)의 내외부를 3D스캐닝 프로젝트가 진행되었습니다.
이 바실리카는 7세기에 건축된 비시고트 양식의 건축물로, 현재 이베리아 반도 남부에서 가장 잘 보존된 비시고트 건축물 중 하나입니다.
|
[데이터 획득 과정]
스캔 작업은 외부와 내부에서 각각 진행되었습니다.
외부에서는 GNSS-GPS로 수집하여 10개의 기준 포인트를 설정했고, 외부 스캔은 5분, 내부 스캔은 9분 소요되었습니다.
내부 스캔은 외부 파사드에서 시작해 종료되었으며, 이 과정으로 두 영역의 데이터가 자동으로 정렬되었습니다.
스캔 중에는 XVS app 소프트웨어를 사용하여 실시간으로 데이터를 모니터링하고 주요 정보를 제공받았습니다. 이후 XVS 클라우드 소프트웨어를 통해 수집된 데이터가 서버로 전송되었으며, 메쉬(mesh) 품질 등의 설정을 조정할 수 있었습니다.
|
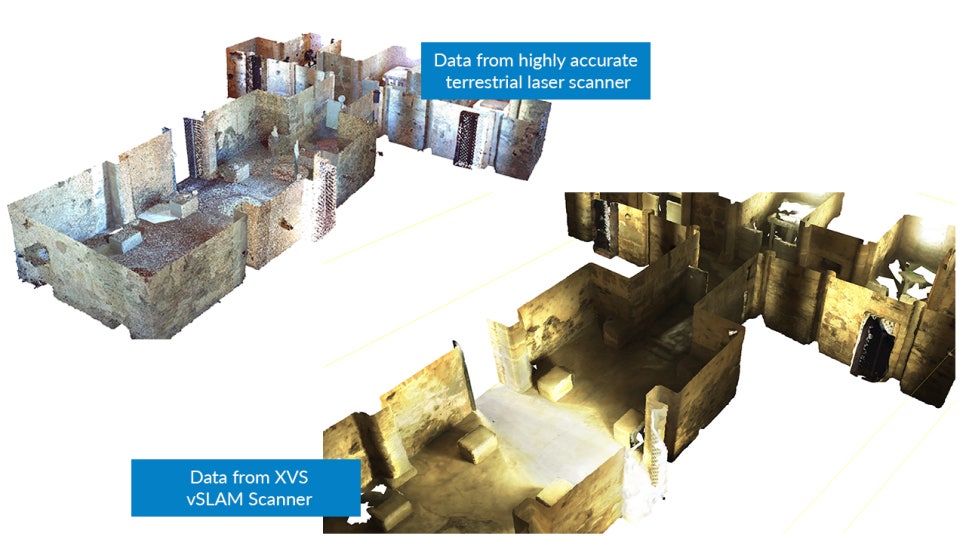
[정확도 비교]
스캔 데이터의 정확성을 평가하기 위해, 정밀한 지상 레이저 스캐너를 사용하여 16개의 서로 다른 위치에서 스캔을 진행했습니다. 또한 구체(sphere) 기반 정렬 기법을 활용하여 정밀도를 높였습니다.
그 결과, 레이저 스캐너와 XVS 간의 평균 편차는
외부 스캔의 평균 편차 ▶️ 4mm
내부 스캔의 평균 편차 ▶️ 10mm
즉, 매우 미미한 차이를 보여주며 레이저 스캐너와 비교해도 XVS의 결과는 매우 높은 정확도를 유지하며, 특히 빠른 스캔 속도와 뛰어난 텍스처 품질을 제공함을 확인할 수 있었습니다.
|
사용 편리성과 데이터 획득의 정확성을 갖춘 XVS |
XVS는 실시간 이미지 기반 3D 스캐닝 시스템을 적용한 최첨단 장비입니다. 사용자가 공간을 자유롭게 이동하면서 직관적으로 스캔할 수 있도록 설계되었습니다.
피로감 없이 장시간 데이터를 수집할 수 있으며, 필요에 따라 다양한 스캔 데이터를 자동으로 병합하여 정밀한 3D 모델을 제작할 수 있습니다.
|
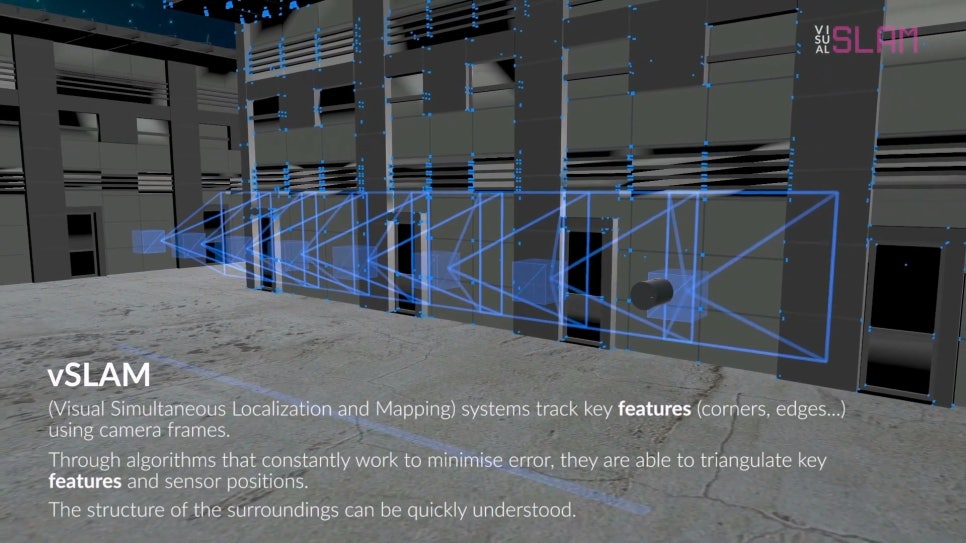
[두 대의 카메라와 Visual SLAM]
XVS는 두 대의 카메라와 관성 측정 장치(IMU)로 구성되어 있습니다.
비주얼 SLAM과 가이드 시스템에 사용되는 [첫 번째 카메라]는 핵심 역할을 수행합니다.
현장에서 획득한 데이터가 고품질이 되도록 보장하는 것입니다. 이 데이터 수집 방법을 통해 모델이 항상 연결되고, 처리 과정에서 오류가 발생할 위험이 줄어듭니다.
이는 매우 중요한 요소입니다. 기존의 사진측량이나 대부분의 이미지 기반 센서는 데이터 획득의 용이함과 속도를 겸비한 고품질 보장 제공이 어렵습니다. 다른 장비를 사용할 경우 정확한 데이터를 수집했는지에 대한 불확실성과 누락된 데이터를 다시 수집해야 할 위험이 항상 존재하기 때문입니다.
[두 번째 카메라]는 2/3″ 센서를 탑재한 5메가픽셀 해상도를 제공하며, 픽셀 크기는 3.45 마이크론입니다. 이 센서는 글로벌 셔터 방식으로 작동하여, 사용자가 카메라를 움직이더라도 이미지가 왜곡되지 않습니다.
반면, 스마트폰과 태블릿의 센서는 롤링 셔터 기술을 사용하기 때문에, 이미지에 미세한 변형이 발생하여 측정 정확도에 영향을 줄 수 있다는 점에 유의해야 합니다.
|
[관성 측정 장치(IMU)]는 스캐너를 수평 조정하고, 초기 내부 방향 값을 설정하는 데 사용됩니다. 이 값은 Visual SLAM으로부터 도출되는 값들과 함께 복잡한 궤적의 3D 재구성에서 성공 가능성을 극대화합니다. |
[자동 이미지 선택]
데이터 수집 과정에서 XVS는 매분 수백 장의 이미지를 캡처합니다. 모든 이미지를 처리하거나 체계적으로 선택하는 것이 실용적이지 않기 때문에, XVS는 지능형 자동 이미지 선택 시스템을 지원합니다.
이 시스템은 모델의 정확성과 해상도를 극대화하기 위해 최적의 이미지 수를 선택합니다. 독자적인 알고리즘으로 객체와의 거리, 사용자 속도, 이미지 매칭, 이미지 품질 및 시야각 등 다양한 요소를 고려하여 최상의 이미지를 선택함으로써, 선택된 이미지 데이터의 정확도를 한층 높입니다.
|
[3D 재구성]
데이터 수집 후에는 이미지의 내부 정합 단계가 진행됩니다. 이 단계에서는 사진측량 카메라의 내부 보정(캘리브레이션) 데이터를 활용하여 정확도를 극대화하는 데 주의를 기울입니다. 내부 정합 단계 과정에서는 비디오 촬영 중 연속 캡처된 이미지에서 수집된 상응점(homologous points)을 재계산합니다.
이번 연구를 통해 검증된 스캐너의 효율성과 정밀도. [Stonex XVS] vSLAM 3D스캐너는 텍스처 품질이 뛰어나면서도, 기존의 정적 및 동적 스캐너보다 빠르고 정확한 대안을 제공합니다.
|
(주)이즈소프트
E support@is-soft.co.kr T 031-346-5112
본사 경기도 군포시 공단로 140번길 46, 엠테크노센터 1001~1004호
자동화센터 경기도 군포시 농심로 2, 삼보스카이비즈 B204호
울산지사 울산광역시 울주군 삼남읍 울산역 2길 52, 2층
자동차부품 충격시험센터 경기도 화성시 마도면 화성로 785번길 117-12
|
|
|