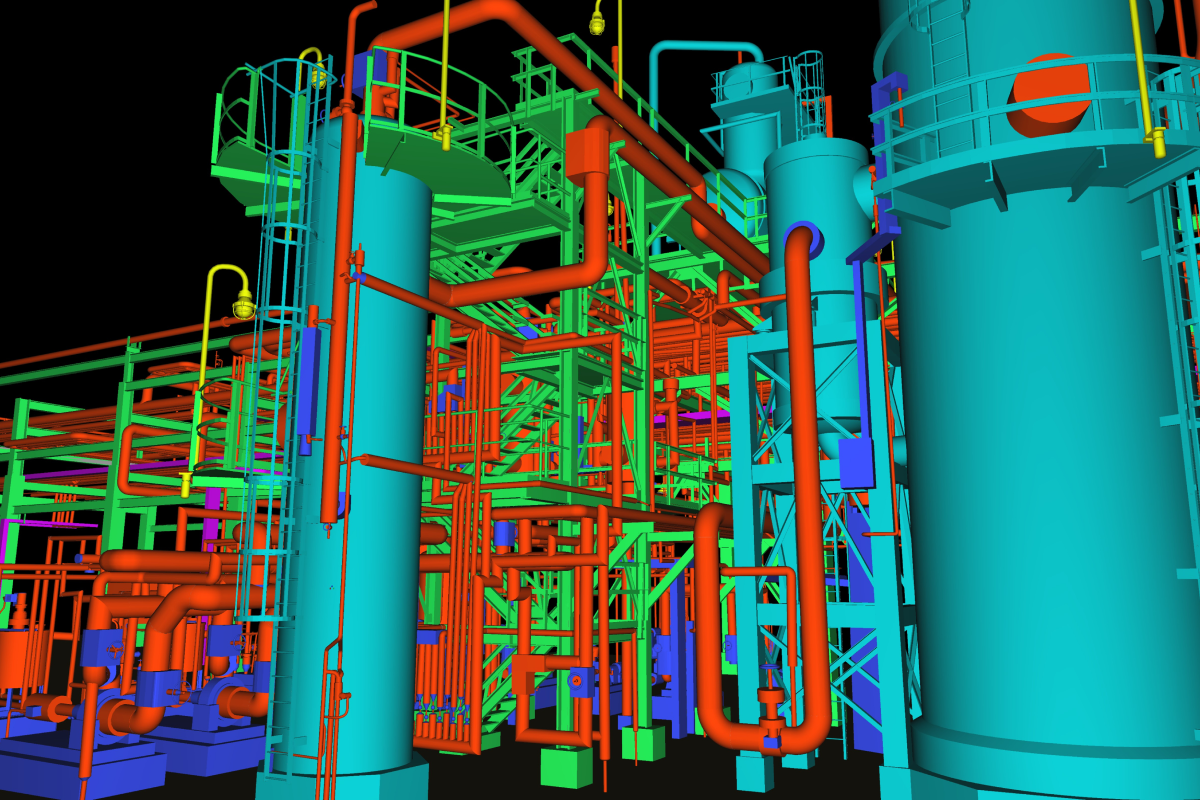
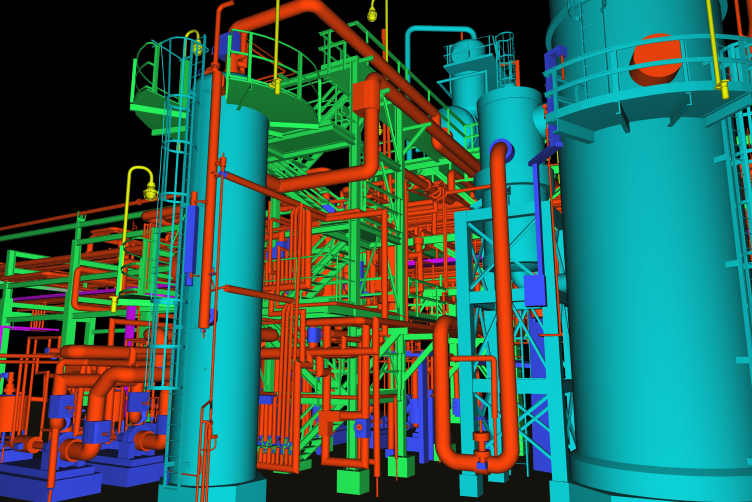
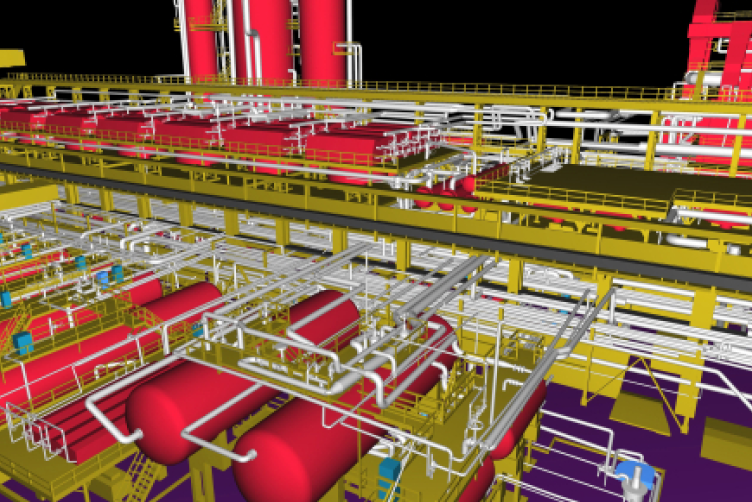
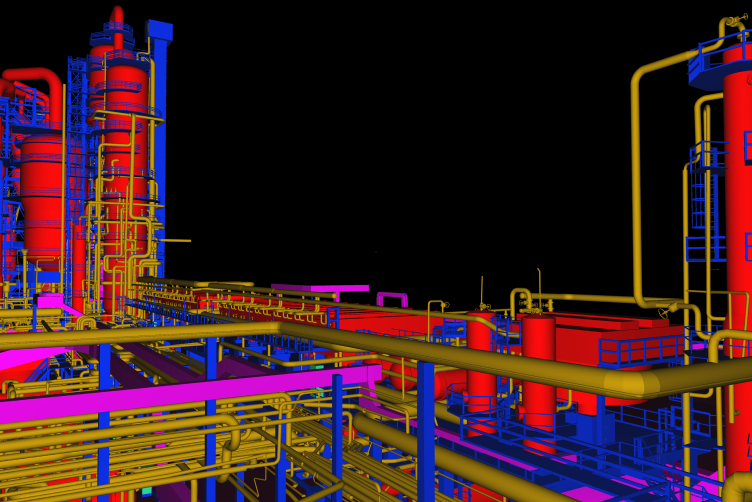
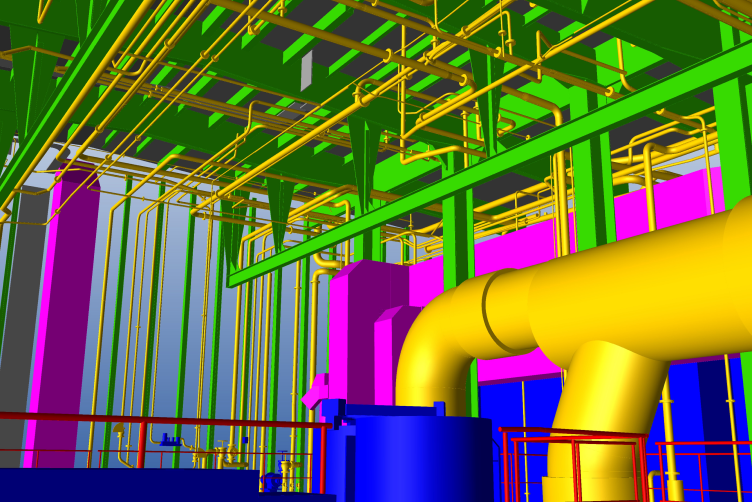
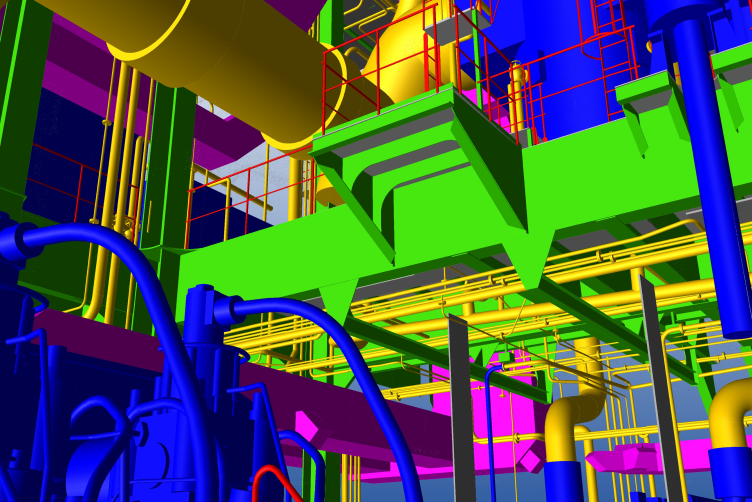
추가 증설, 유지보수로 인한 기존도면과 현재 상태가 맞지 않는 부분을 스캔을 통해 확인하고, Point Cloud를 기반으로 3D Modeling data를 만듦으로써, 최신의 3차원 도면을 만들어 드립니다.
최신의 3차원 도면을 이용하여 정확한 현황분석과 증설 시 Pipe간의 간섭체크를 확인 할 수 있습니다.
플랜트/조선해양 작업 프로세스
01
플랜트 시설의 경우 고정형 스캐너와 이동형 스캐너를 이용하여 스캔합니다. 고정형 스캐너를 사용하여 대상을 스캔 합니다. 미 스캔 부분이 생기지 않게 스캐너의 위치를 이동하여 스캔합니다. 선박의 경우 고정형 스캐너를 사용합니다. 선박의 내부의 경우 협소하고 정박해 있을 때 빠르게 스캔 해야 하기 때문에 안전하게 스캔 해야 합니다. 선박 내부의 엔진룸과 casing 과 같은 곳들은 상하의 길이가 높고, 계단들이 많이 있기 때문에 스캔 위치를 잘 확인해서 데이터의 미 스캔 부분이 없고, 정합이 가능 하도록 스캔 해야 합니다. 그렇기 때문에 더 많은 스캔 포지션이 필요합니다. 전체 레이아웃을 잡기 위해 이동형 스캐너를 드론에 부착 하거나, 손으로 들고 전체적으로 스캔해 줍니다.
02
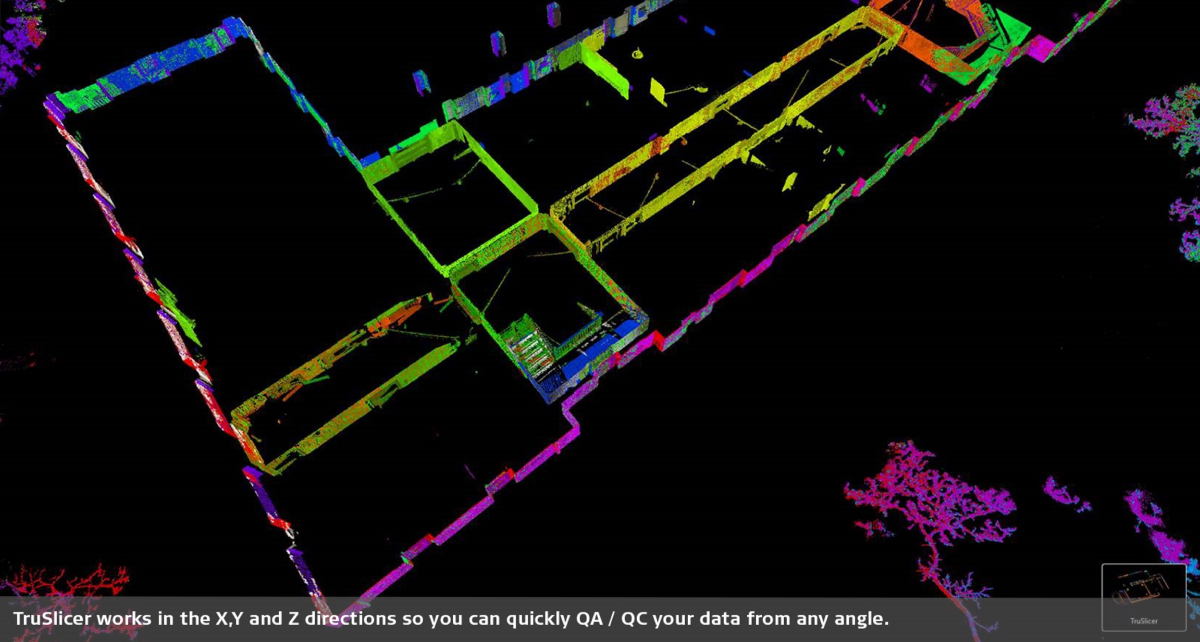
고정형 스캐너는 VIS가 적용되고, 이동형 스캐너는 SLAM이 적용되어 정합 과정을 최소한으로 할 수 있습니다. 고정형 스캔 데이터를 Register360 에 import하여 정합 된 데이터를 확인하고, 이상이 있다면 데이터를 수동으로 정리하고, 이상이 없다면 데이터 정리를 위해 Cyclone으로 import 시켜 줍니다. 이동형 스캐너는 스캔이 완료되면 장비에 USB를 꼽기만 하면 데이터를 받을 수 있고, 그 데이터를 Emesent Aura에 import하고 클릭 한번만 하면 프로세싱이 끝나고 완성된 Point Cloud 를 볼 수 있습니다.
03
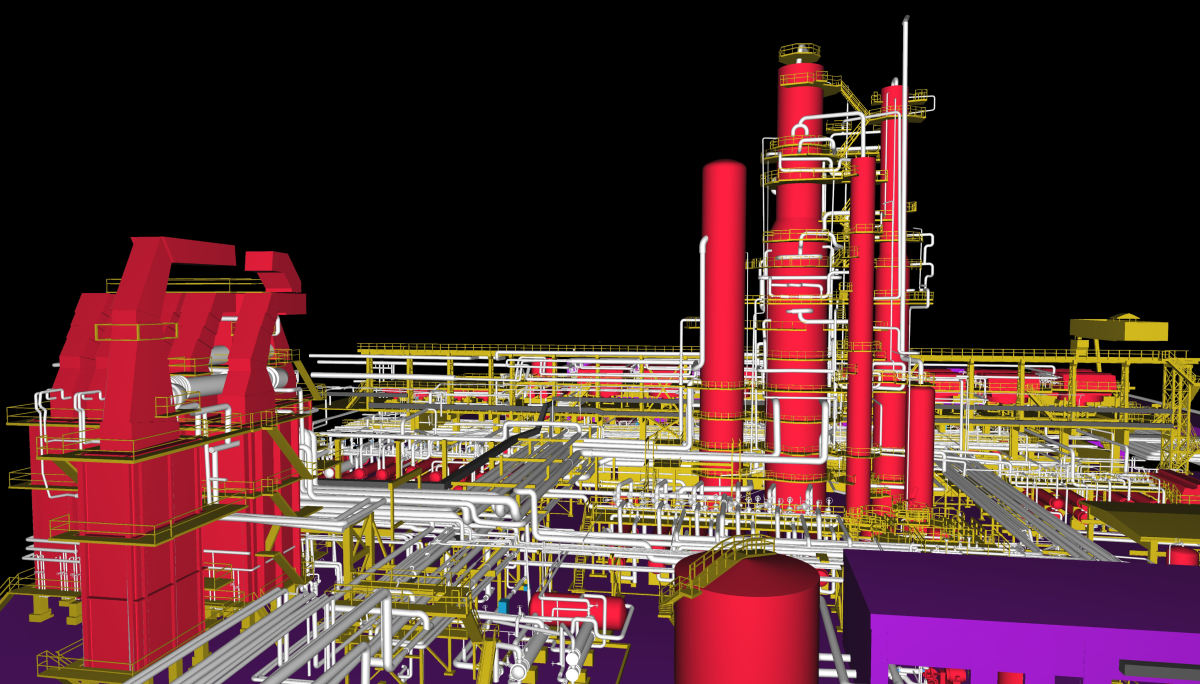
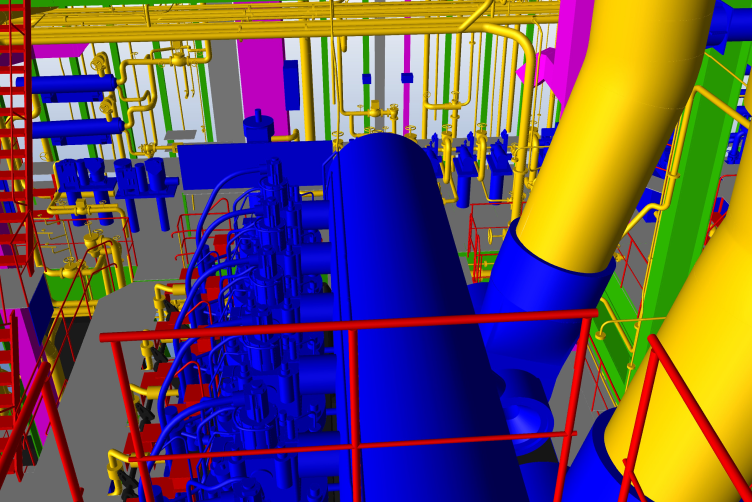
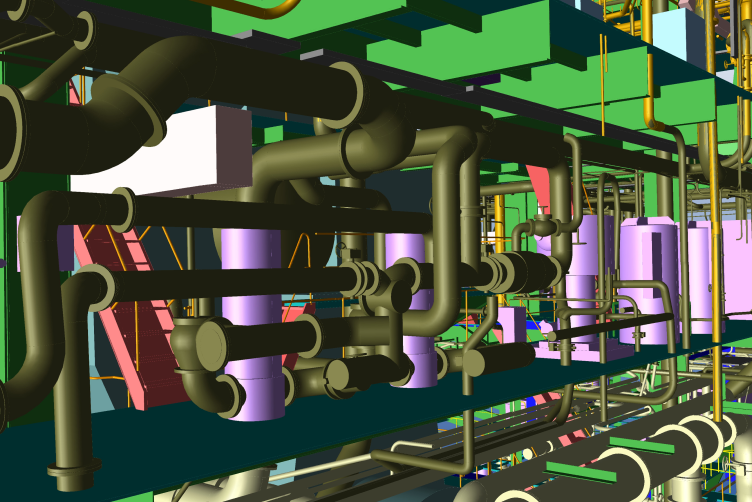
정리된 스캔 데이터를 원하는 프로그램에 변환하여 import 합니다. 이후 point cloud를 기반으로 모델링해 줍니다. 모델링을 바탕으로 기존 도면과의 비교 또는 원하는 방식으로 활용합니다.