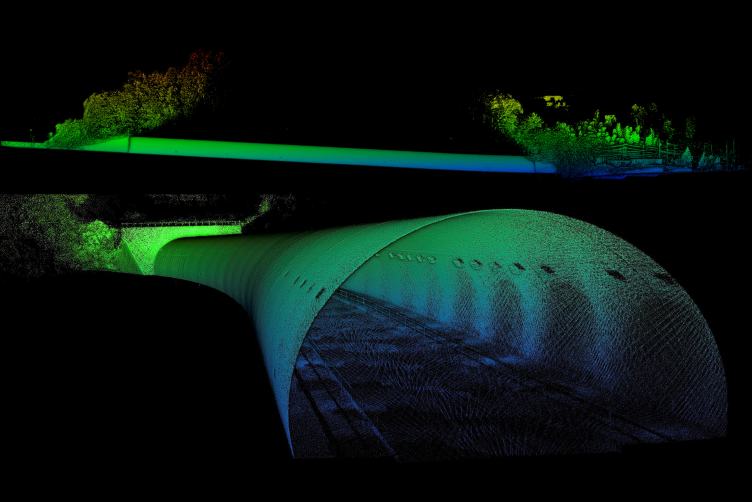
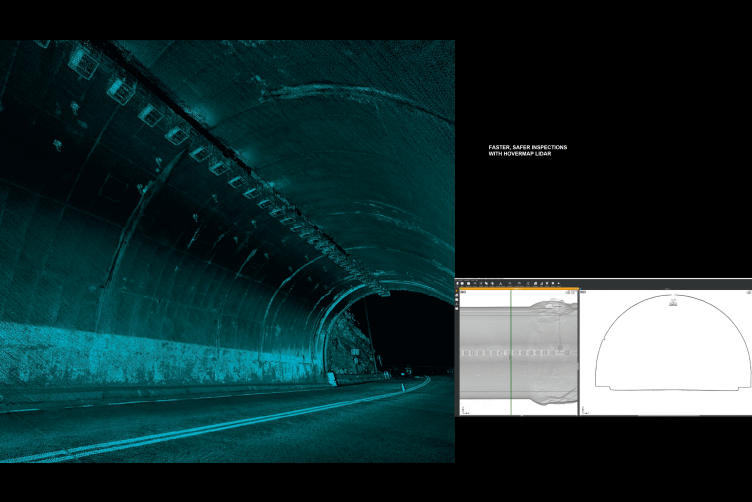
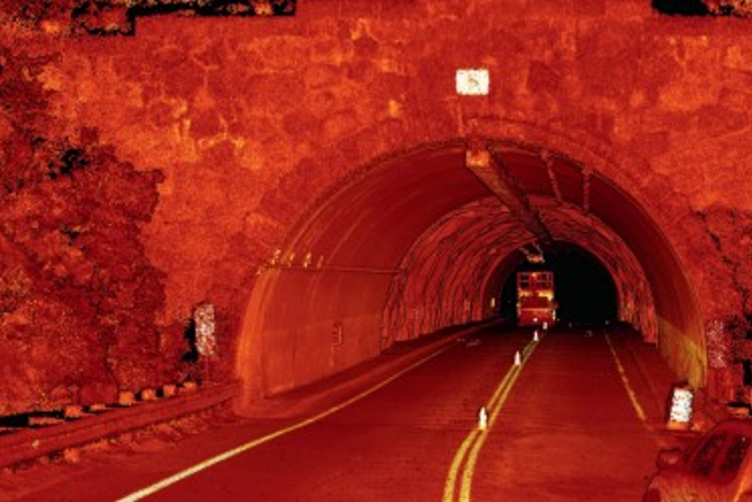
터널, 교량, 지형 등의 지역을 빠르게 스캔할 수 있습니다. 스캔을 통해 얻은 3차원 Point Cloud를 활용하여, 보다 안전하고 빠르고 쉽게 정보를 취득할 수 있습니다.
교량/터널/광산 작업 프로세스
01
고정형 스캐너와 이동형 스캐너를 이용하여 스캔합니다.
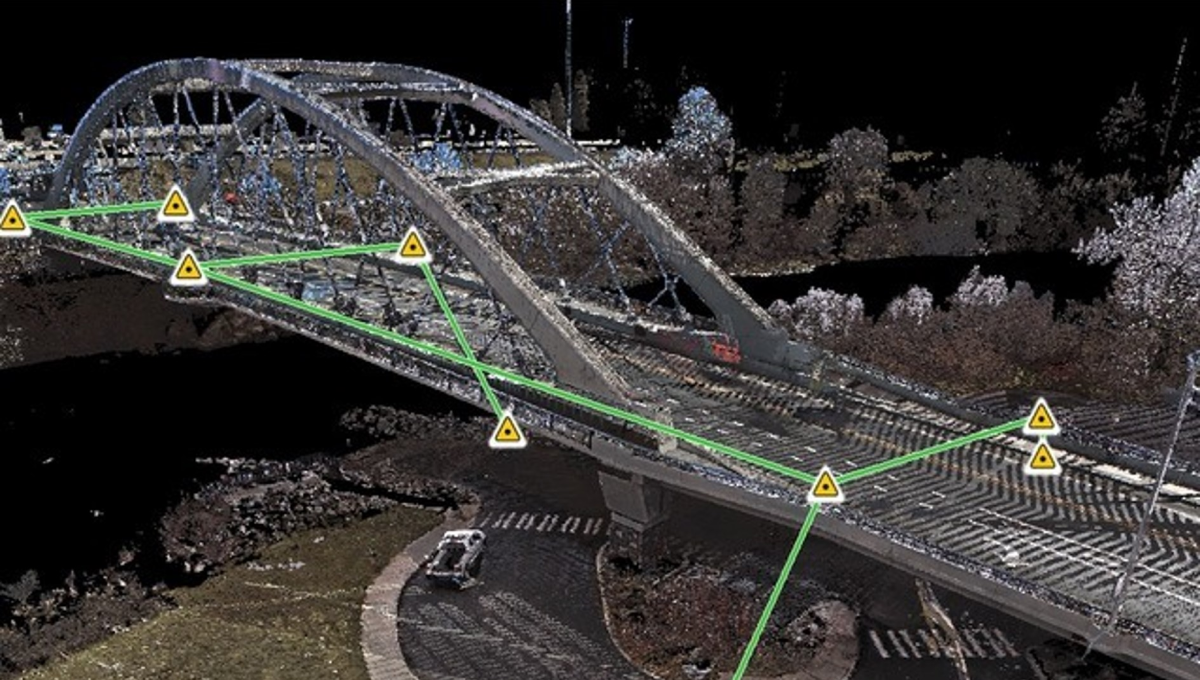
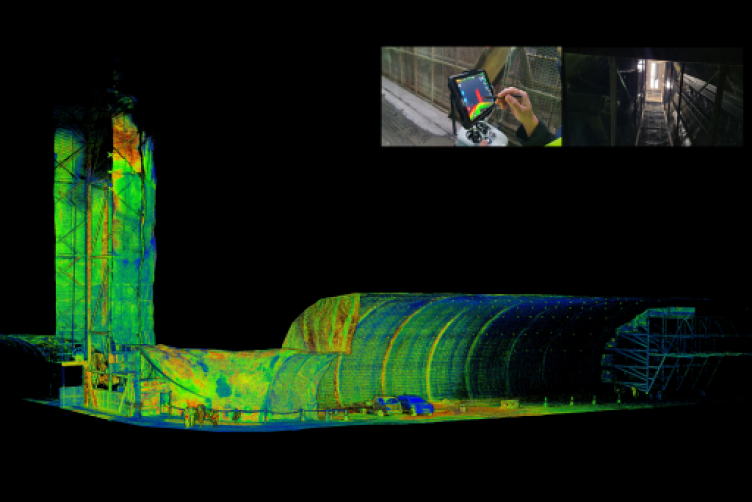
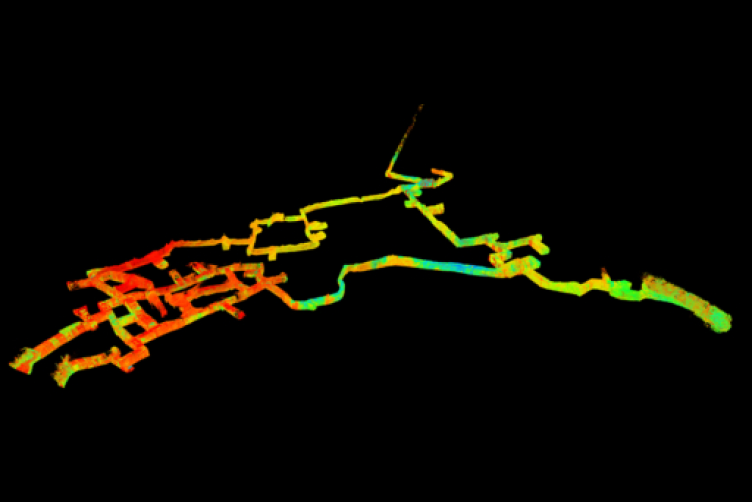
교량 및 터널의 경우 사용자가 원하는 정밀도에 따라 스캐너를 선택하여 스캔 합니다. 하지만 교량 하부나 GPS수신이 되지 않는 곳인 경우 이동형 스캐너인 Hovermap를 드론에 부착시켜 사용하길 권장 드립니다. 대부분의 드론은 교량하부로 들어가면 GPS수신이 끊기기 때문에 드론의 추락 위험이 있습니다. 하지만 Hovermap의 SLAM방식을 이용한다면 GPS수신이 없는 곳에서도 드론의 비행이 가능하고 Hovermap의 VESH가 드론을 안전하게 보호 하여 고품질의 Point Cloud data를 얻을 수 있습니다. 1~2mm의 정밀도를 요구 하는 작업에는 고정형 스캐너를 사용함으로써 조금 더 정확한 데이터를 얻을 수 있습니다.
02
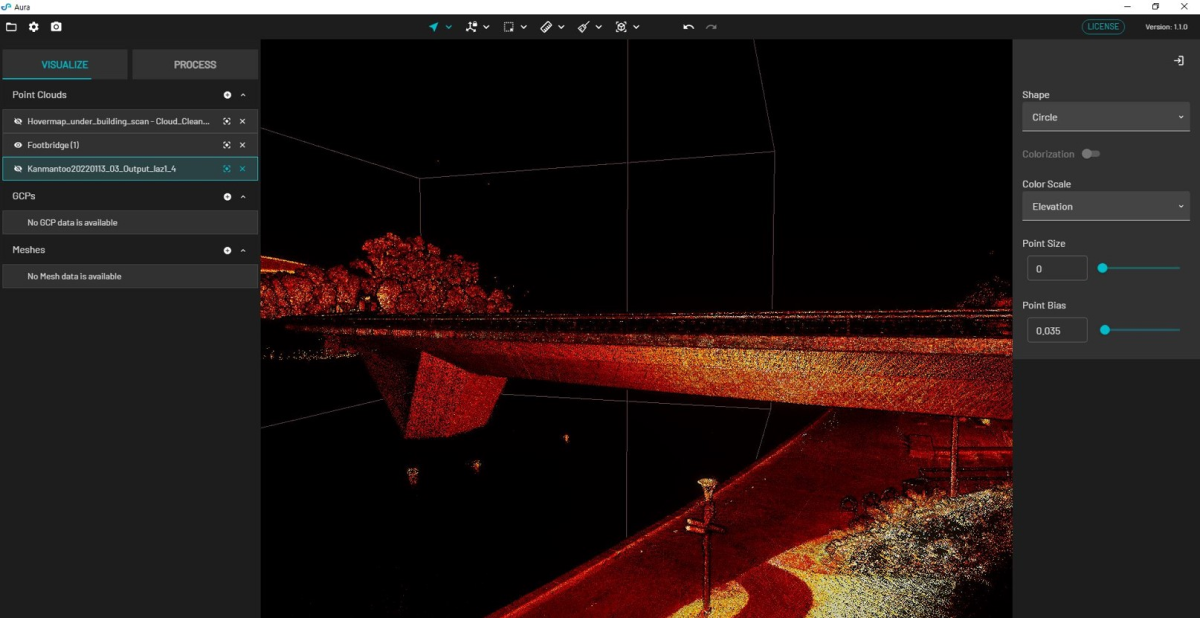
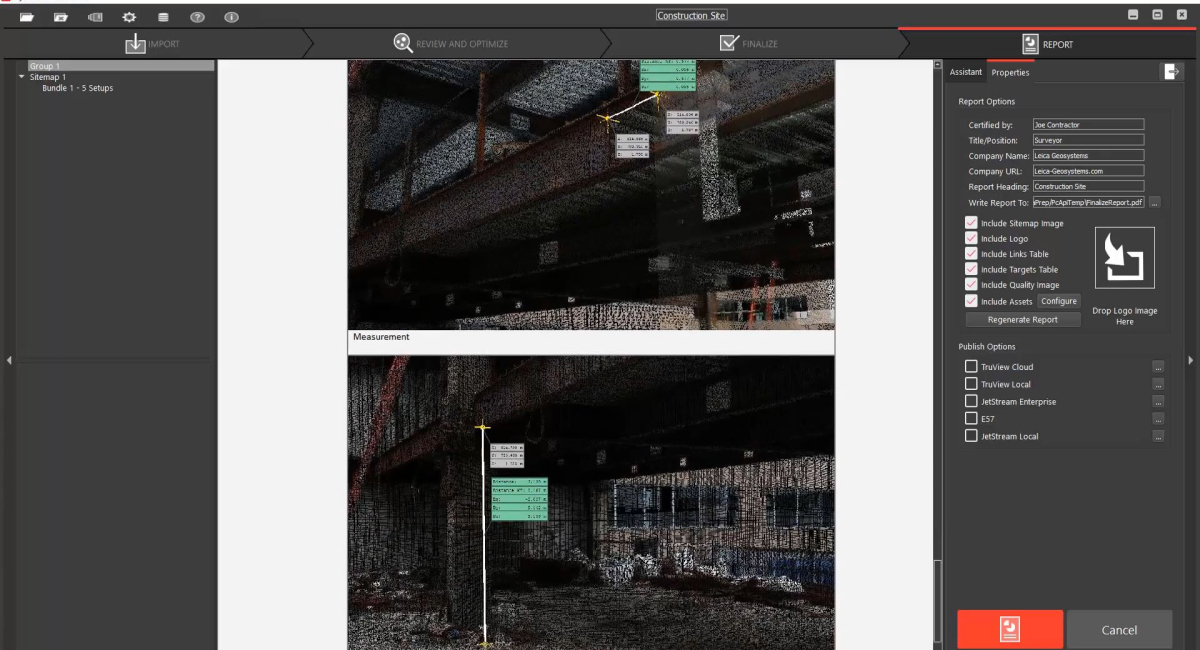
고정형 스캐너는 VIS가 적용되고, 이동형 스캐너는 SLAM이 적용되어 정합 과정을 최소한으로 할 수 있습니다. 고정형 스캔 데이터를 Register360 에 import하여 정합 된 데이터를 확인하고, 이상이 있다면 데이터를 수동으로 정리하고, 이상이 없다면 데이터 정리를 위해 Cyclone으로 import 시켜 줍니다. 이동형 스캐너는 스캔이 완료되면 장비에 USB를 꼽기만 하면 데이터를 받을 수 있고, 그 데이터를 Emesent Aura에 import하고 클릭 한번만 하면 프로세싱이 끝나고 완성된 Point Cloud 를 볼 수 있습니다.
03
정리된 스캔 데이터를 원하는 프로그램에 변환하여 import 합니다. 이후 point cloud를 기반으로 모델링해 줍니다. 모델링을 바탕으로 기존 도면과의 비교 또는 원하는 방식으로 export해서 활용이 가능합니다.